Professional Documents
Culture Documents
Chương 2&3
Chương 2&3
Uploaded by
Du PhạmCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Chương 2&3
Chương 2&3
Uploaded by
Du PhạmCopyright:
Available Formats
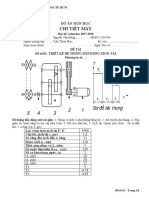
Đồ án thiết kế máy Đề số:
CHƯƠNG II: THIẾT KẾ ĐỘNG HỌC CHO MÁY
2.1 Thiết kế sơ đồ kết cấu động học
Máy mới thiết kế có các số liệu ban đầu như sau:
Động cơ chính: n = 1440 [vg/ph]
Hộp tốc độ:
Số cấp tốc độ: Z = 23.
Công bội: φ = 1,26.
Tốc độ: nmin = 10,6 [vg/ph]
Hộp chạy dao: dùng cơ cấu Norton
Ren hệ mét: tp = 1,5 ÷ 16 [mm]
Ren hệ Anh: n = 24 ÷ 2
Ren Modun: m = 0,5 ÷ 7
Lượng chạy dao: Sdocmin = 2. Sngangmin = 0,08 [mm/vg]
Dựa trên nhiệm vụ thiết kế máy mới, kết hợp với việc tham khảo máy sẵn có (máy
tiện T620), ta có được sơ đồ kết cấu động học của máy mới:
Hình 2.1 Sơ đồ kết cấu động học của máy mới
Trong đó:
iv: tỉ số truyền của hộp tốc độ
ikd: tỉ số truyền khuếch đại (dùng khi tiện ren khuếch đại)
iđc: tỉ số truyền đảo chiều.
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 1
Đồ án thiết kế máy Đề số:
iTT: tỉ số truyền thay thế.
ics: tỉ số truyền cơ sở.
igb: tỉ số truyền gấp bội.
ixd: tỉ số truyền xe dao.
tx1: bước của trục vít me dọc.
tx2: bước của trục vít me ngang.
Các phương trình xích động tổng quát trong máy:
Phương trình xích tốc độ: nđc.iv = nTC [vg/ph] (trong iv có ikd).
Phương trình xích cắt ren thường: 1vgTC.iđc.iTT.ics.igb.tx1 = tp [mm].
Phương trình xích cắt ren khuếch đại dọc:
1vgTC.ikđ.iđc.iTT.ics.igb.tx1 = tp [mm]
Phương trình xích khuếch đại ngang:
1vgTC.ikđ.iđc.iTT.ics.igb.ixd.tx1 = tp1 [mm]
Phương trình xích tiện trơn ăn dao dọc:
1vgTC.iđc.iTT.ics.igb.ixd. (thanh răng – bánh răng 10 x 3) = Sd [mm/vg]
Phương trình xích tiện trơn ăn dao ngang:
1vgTC.iđc.iTT.ics.igb.ixd. tx2 = Sng [mm/vg]
2.2 Thiết kế truyền dẫn hộp tốc độ
2.2.1 Xác định chuỗi số vòng quay tiêu chuẩn
Theo yêu cầu thiết kế: hộp tốc độ máy mới có số cấp tốc độ Z = 23, công bội là φ = 1,26,
tốc độ nhỏ nhất nhất nmin = 10,6 [vg/ph] →nmax = 1700[vg/ph]
Ta có: φ=1.26=1.0 64
Trị số vòng quay cơ sở thành lập từ trị số vòng quay đầu tiên n1= 10,6 vg/ph
Ta có dãy tốc độ tiêu chuẩn của máy (vg/ph):
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 2
Đồ án thiết kế máy Đề số:
Tốc độ nTC Tốc độ nTC
[vg/ph] [vg/ph]
n1 10,6 n13 170
n2 13,2 n14 210
n3 17 n15 265
n4 21 n16 335
n5 26,5 n17 420
n6 33,5 n18 530
n7 42 n19 670
n8 53 n20 850
n9 67 n21 1050
n10 85 n22 1320
n11 105 n23 1700
n12 132
Bảng 2.1 Bảng dãy tốc độ tiêu chuẩn của máy
2.2.2 Chọn phương án không gian (PAKG)
Theo yêu cầu thiết kế thì số cấp tốc độ là Z = 23, nhưng vì 23 là số nguyên tố,
không thể phân tích ra thành các thừa số được, hay nói cách khác là ta không thể bố trí
không gian với 23 cấp tốc độ được. Với việc tham khảo máy 1K62, ta chọn Z = 24, và
trong quá trình thiết kế thì ta sẽ làm trùng một cấp tốc độ để thoả mãn số cấp tốc độ theo
yêu cầu thiết kế.
Với số cấp tốc độ Z = 24, ta có các PAKG có thể thiết kế cho máy mới như sau:
Z = 24 = 24 x 1 = 12 x 2 = 6 x 2 x 2
= 3 x 2 x 2 x 2 = 2 x 3 x 2 x 2 = 2 x 2 x 3 x 2 = 2 x 2 x 2 x 3.
Với nhiều PAKG như vậy thì ta cần phải tìm ra một PAKG hợp lý để máy có kết
cấu nhỏ gọn mà vẫn đảm bảo được yêu cầu thiết kế.
Tính số nhóm truyền tối ưu dùng trong hộp tốc độ:
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 3
Đồ án thiết kế máy Đề số:
Trong hộp tốc độ, tỉ số truyền thường bị giới hạn như như sau:
1
≤i ≤ 2
4
1 nmin n 1
Ta có: i min gh= X
= =
4 nđc nđc
Trong đó:
X: là số nhóm truyền tối ưu có trong hộp tốc độ thiết kế.
nmin= n1=10,6 (vg/ph): tốc độ nhỏ nhất của hộp tốc độ thiết kế.
nđc = 1440 (vg/ph): tốc độ động cơ của hộp tốc độ thiết kế.
nđc 1440
Ta tính được X =log 4 =log 4 =3,543. Vì số nhóm truyền là số nguyên
n1 10 , 6
nên ta chọn X = 4 (nhóm truyền).
Như vậy là PAKG có thể chọn còn lại là:
Z=3x2x2x2=2x3x2x2=2x2x3x2=2x2x2x3
Ta chọn PAKG tối ưu dựa trên các tiêu chí sau đây:
Tổng số bánh răng: tổng số bánh răng ở các PAKG kể trên đều bằng nhau,
và bằng: SR = 2 x (3 + 2 + 2 + 2) = 18 (bánh răng).
Tổng số trục: tổng số trục ở các PAKG kể trên đều bằng nhau, và bằng: S T
= X + 1 = 4 + 1 = 5 (trục).
Chiều dài trục: phụ thuộc vào số lượng khối bánh răng 2 bậc và 3 bậc trong
hộp tốc độ. Gọi B là bề rộng của răng (coi như bề rộng các bánh răng là như nhau) và f là
khe hở chỗ ăn khớp (coi là như nhau). Vậy ta có:
Đối với khối bánh răng 2 bậc: không gian chiếm chỗ là: L2B = 4B + 3f
Đối với khối bánh răng 3 bậc: không gian chiếm chỗ là: L3B = 7B + 6f
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 4
Đồ án thiết kế máy Đề số:
Các PAKG kể trên đều có 1 khối bánh răng 3 bậc và 3 khối bánh răng 2 bậc. Giả
sử khoảng cách giữa 2 khối bánh răng liên tiếp với nhau cũng là f. Vậy chiều dài trục nhỏ
nhất
là: LTmin = (7B + 6f) + f + (4B + 3f) + f + (4B + 3f) + f + (4B + 3f) = 19B + 18f
II
III
IV
Hình 2.2 Sơ đồ bố trí không gian của hộp tốc độ máy mới
(với PAKG là 2 x 3 x 2 x 2)
Số bánh răng chịu xoắn ở trục cuối: càng ít càng tốt.
Vị trí của các cơ cấu đặc biệt (nếu có): trong hộp tốc độ máy tiện còn có
thêm cơ cấu ly hợp ma sát, dùng để đóng/mở chuyển động đảo chiều quay trục chính.
Tham khảo máy 1K62, ta sẽ lắp ly hợp ma sát ở trục I (xen vào nhóm truyền thứ nhất).
Để đánh giá tổng quan hơn, ta lập bảng so sánh các PAKG theo các tiêu chí kể trên,
để tìm ra PAKG tối ưu nhất.
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 5
Đồ án thiết kế máy Đề số:
PAKG
Yếu tố 3x2x2x2 2x3x2x2 2x2x3x2 2x2x2x3
so sánh
Tổng số bánh
18 18 18 18
răng (SR)
Tổng số trục (ST) 5 5 5 5
Chiều dài trục
19B + 18f 19B + 18f 19B + 18f 19B + 18f
(LT)
Số bánh răng chịu
momen xoắn ở 2 2 2 3
trục cuối
Vị trí lắp ly hợp
Trục I Trục I Trục I Trục I
ma sát
Bảng 2.2 Bảng so sánh các PAKG.
Từ bảng so sánh trên ta có những nhận xét như sau:
Đối với PAKG Z = 3 x 2 x 2 x 2: khi lắp ly hợp ma sát lên trục I thì trục I sẽ rất
dài (chiều dài 1 khối bánh răng 3 bậc + chiều dài ly hợp). Mặt khác,3 bánh răng lắp lên
trục I làm cho momen xoắn lớn khiến cho đĩa ma sát mau bị mòn. Vì vậy ta không chọn
PAKG này.
Đối với PAKG Z = 2 x 2 x 3 x 2: phương án này thuận lợi cho việc lắp ly
hợp ma sát lên trục I, nhưng lưới kết cấu cho PAKG này không có hình rẻ quạt, do đó
làm kết cấu hộp tốc độ trở nên cồng kềnh. Vì vậy ta không chọn PAKG này.
Đối với PAKG Z = 2 x 2 x 2 x 3: phương án này thuận lợi cho việc lắp ly
hợp ma sát lên trục I, tuy nhiên số bánh răng chịu momen xoắn ở trục cuối cùng lại nhiều
hơn so với các PAKG còn lại (3 bánh răng so với 2 bánh răng), dẫn đến việc trục cuối
cùng sẽ phải chịu momen xoắn lớn hơn. Vì vậy ta không chọn PAKG này.
Đối với PAKG Z = 2 x 3 x 2 x 2: phương án này khắc phục được hết các
nhược điểm của các PAKG còn lại, nên PAKG này là tối ưu.
Vậy ta chọn PAKG để thiết kế hộp tốc độ là: Z = 2 x 3 x 2 x 2.
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 6
Đồ án thiết kế máy Đề số:
2.2.3 Phân tích các phương án thứ tự (PATT)
Việc lập ra PATT là việc lập thứ tự ưu tiên thay đổi tỉ số truyền giữa các nhóm dựa
trên nguyên tắc: thay đổi hết tỉ số truyền trong nhóm phía trước rồi mới đến nhóm sau.
Với PAKG đã chọn là Z = 2 x 3 x 2 x 2, tức là có 4 nhóm truyền, ta sẽ có tất cả là
4! = 24 (PATT). Các phương án đó được thể hiện qua bảng sau đây:
TT 1 2 3 4 5 6
PAKG 2x3x2x2 2x3x2x2 2x3x2x2 2x3x2x2 2x3x2x2 2x3x2x2
PATT I II III IV I III II IV I IV II III I II IV III I III IV II I IV III II
ĐTN [1][2][6][12] [1][4][2][12] [1][8][2][4] [1][2][12][6] [1][4][12][2] [1][8][4][2]
Lưới
kết cấu
[X]max 12 12 16 12 12 16
[ X ] max
φ 16 16 40 16 16 40
TT 7 8 9 10 11 12
PAKG 2x3x2x2 2x3x2x2 2x3x2x2 2x3x2x2 2x3x2x2 2x3x2x2
PATT II I III IV II III I IV II III IV I II I IV III II IV III I II IV I III
ĐTN [3][1][6][12] [2][4][1][12] [2][4][12][1] [3][1][12][6] [2][8][4][1] [2][8][1][4]
Lưới
kết cấu
[X]max 12 12 12 12 16 16
[ X ] max
φ 16 16 16 16 40 40
TT 13 14 15 16 17 18
PAKG 2x3x2x2 2x3x2x2 2x3x2x2 2x3x2x2 2x3x2x2 2x3x2x2
PATT III I II IV III II I IV III IV I II III I IV II III II IV I III IV II I
ĐTN [6][1][3] [12] [6][2][1][12] [4][8][1][2] [6][1][12][3] [6][2][12] [1] [4][8][2] [1]
Lưới
kết cấu
[X]max 12 12 16 12 12 16
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 7
Đồ án thiết kế máy Đề số:
[ X ] max
φ 16 16 40 16 16 40
TT 19 20 21 22 23 24
PAKG 2x3x2x2 2x3x2x2 2x3x2x2 2x3x2x2 2x3x2x2 2x3x2x2
PATT IV I II III IV II I III IV III I II IV I III II IV II III I IV III II I
ĐTN [12][1][3] [6] [12][2][1] [6] [12][4][1] [2] [12][1][6] [3] [12][2][6][1] [12][4][2][1]
Lưới
kết cấu
[X]max 12 12 12 12 12 12
[ X ] max
φ 16 16 16 16 16 16
Bảng 2.3 Bảng lưới kết cấu nhóm của PAKG Z = 2 x 3 x 2 x 2
Ta có thể chọn ra được ba phương án điển hình để vẽ lưới kết cấu như sau:
Phương án 1:
PAKG: 2 x 3 x 2 x 2
PATT: I II III IV
2[1] 3[2] 2[6] 2[12]
Hình 2.3 Lưới kết cấu của PAKG và PATT:
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 8
Đồ án thiết kế máy Đề số:
Phương án 2:
PAKG: 2 x 3 x 2 x 2
PATT: IV I II III
2[12] 3[1] 2[3] 2[6]
Hình 2.4 Lưới kết cấu của PAKG và PATT:
Để cho kích thước của hộp tốc độ nhỏ gọn, bố trí các cơ cấu truyền động trong hộp
chặt chẽ nhất mà vẫn đảm bảo được yêu cầu thiết kế, ta chọn PATT có lưới kết cấu có
dạng hình rẻ quạt (tức là lượng mở, các tỉ số truyền của các nhóm thay đổi từ từ, đều
đặn).
Vậy ta chọn phương án thứ tự: I II III IV
PAKG: 2 x 3 x 2 x 2
PATT: I II III IV
2[1] 3[2] 2[6] 2[12]
Nhưng vấn đề đặt ra là: lượng mở 2[12] là quá lớn (vì φxmax = 1,2612 = 16 > 8). Để
1
đảm được điều kiện về tỉ số truyền trong hộp tốc độ là ≤i ≤ 2 thì φxmax≤ 8. Tham khảo
4
máy 1K62, ta sẽ giảm lượng mở của hộp tốc độ, từ 2[12] xuống còn 2[6] (tức xmax = 6).
PAKG và PATT sau khi điều chỉnh lại lượng mở là:
PAKG: 2 x 3 x 2 x 2
PATT: I II III IV
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 9
Đồ án thiết kế máy Đề số:
2[1] 3[2] 2[6] 2[6]
Vì ta thu hẹp lượng mở xuống còn 2[6] nên sẽ xảy ra hiện tượng là có 6 tốc độ bị
trùng. Số cấp tốc độ giảm từ 24 xuống còn 18 cấp tốc độ. Để bù lại 6 cấp tốc độ trùng kể
trên, ta sẽ thiết kế thêm 6 cấp tốc độ thiếu nữa. Tham khảo máy 1K62, ta sẽ tiến hành
thiết kế thêm một trục nữa (trục VI), thiết kế thêm 1 lưới tốc độ khác bằng cách nối tốc
độ trực tiếp từ trục III đến trục VI.
Khi đó PAKG là Z = Z1 + Z2 = 18 + 6
Lưới kết cấu của máy mới sau khi thiết kế thêm trục VI và lưới tốc độ mới.
PAKG và PATT của hộp tốc độ sau khi thiết kế thêm:
- Đường truyền gián tiếp: từ n1 tới n18 (dãy tốc độ thấp)
PAKG: 2 x 3 x 2 x 3 x 1
PATT: I II III IV V
2[1] 3[2] 2[6] 2[6] 1[0]
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 10
Đồ án thiết kế máy Đề số:
Hình 2.5 Lưới kết cấu sau khi thiết kế thêm
- Đường truyền trực tiếp: từ n19 tới n24 (dãy tốc độ cao)
PAKG: 2 x 3 x 1
PATT: I II III
2[1] 3[2] 1[0]
Để nối tiếp dãy tốc độ thấp và dãy tốc độ cao, và để đảm bảo theo yêu cầu thiết kế là
Z = 23 cấp tốc độ, ta sẽ cho trùng 2 cấp tốc độ là n 18 và n19: n18 = n19 = 670 (vg/ph). Sở dĩ
ta chọn tốc độ trùng là 670 (vg/ph) vì tốc độ này được sử dụng rộng rãi và phổ biến, khi
đó ta có thể sử dụng tốc độ đó trên hai đường truyền để làm tăng tuổi thọ máy.
2.2.4 Vẽ đồ thị vòng quay (ĐTVQ)
Nhược điểm của lưới kết cấu không biểu diễn được tỷ số truyền cụ thể, các chỉ số
vòng quay trên các trục, do đó không tính được truyền dẫn trong hộp để khắc phục nhược
điểm này ta vẽ đồ thị vòng quay.
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 11
Đồ án thiết kế máy Đề số:
Qua tham khảo máy 1K62 ta chọn động cơ điện có nđc = 1440 vòng/phút
Như vậy, để dễ dàng vẽ được đồ thị vòng quay nên chọn trước số vòng quay n0 của trục
vào sao đó ta mới xác định tỷ số truyền. Mặt khác n0 càng cao thì càng tốt, nếu n0 thì số
vòng quay của các trục trung gian sẽ cao mô men xoắn bé kích thước bánh răng
nhỏ… Tham khảo máy 1K62, trên trục đầu tiên lắp bộ ly hợp ma sát để cho ly hợp ma sát
làm việc trong điều kiện tốt nhất ta nên chọn n0 = n19 =670 vòng/phút
n0 670
Ta có: i đai = = =0 , 47
nđc . ηđai 1440.0,985
Trong đó:
Nđc : số vòng quay của động cơ
Iđ : Tỷ số truyền từ trục động cơ đến trục I
η đai: hệ số trượt dây đai
Đối với mỗi nhóm tỷ số truyền ta chỉ cần chọn tỷ số truyền sao cho đảm bảo điều kiện:
1
≤i ≤ 2
4
Nhóm truyền I: từ trục I II có đặc tính nhóm 2[1] có 2 tỷ số truyền i1 , i2
Dựa vào tham khảo máy mẫu 1K62 ta chọn i1 = φ
Tức là tia i1 nghiêng phải 1 đoạn logφ
Ta xác định tia i2 qua i1 :i2 = 1: φ
Vậy i2 = φ2tia i2 nghiêng phải 1 khoảng 2.log φ
Nhóm truyền II: từ trục II III , đặc tính của nhóm truyền 3[2]
i3 : i4 : i5 = 1 :φ2 : φ4
Tham khảo máy 1K62 ta chọn
i3 = φ-4 : tia i3 nghiêng trái 1 khoảng 4.logφ
i4 = φ-2 : tia i4 nghiêng trái 1 khoảng 2.logφ
i5 = 1 tia i5 thẳng đứng.
Nhóm truyền III: từ trục III IV , đặc tính của nhóm truyền 2[6]
i6 :i7 = 1: φ6
Tham khảo máy 1K62 ta chọn
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 12
Đồ án thiết kế máy Đề số:
i6 = φ-6 : tia i6 nghiêng trái 1 khoảng 6.logφ
i7 = 1 tia i7 thẳng đứng.
Nhóm IV: từ trục IV V , đặc tính nhóm truyền 2[6]
i6 :i7 = 1: φ6
Tham khảo máy 1K62 ta chọn
i8 = φ-6 : tia i8 nghiêng trái 1 khoảng 6.logφ
i9 = 1 tia i9 thẳng đứng.
Nhóm V:từ trục V VI có 1 tỷ số truyền i 10 . Tỷ số truyền này ta không thể tự chọn
được mà nó phụ thuộc vào vận tốc nhỏ nhất nmin . Ta có quan hệ
n min=n0 . i 1 . i 3 . i 6 .i 8 .i 10
10 , 6 −3
i 10= ≈ 0 , 5=1 , 26
670.1, 26.0 , 4.0 , 25.0 , 25
Như vậy ta có tia i10 nghiêng trái 1 khoảng 3.logφz
Nhóm truyền tốc độ cao: truyền từ trục III VI có 1 tỷ số truyền, tương tự thì tỷ số
truyền này ta cũng không thể tự chọn mà nó phụ thuộc vào n max. ta cũng có quan hệ
n max=n 0 . i 2 . i 5 . i 11
1700 2
i 11= 2
=1 , 6=1 , 26
670. 1 ,26 .1
Qua phần chọn tỷ số truyền này ta thấy tất cả đều thỏa mãn điều kiện
1
≤i ≤ 2
4
Từ những lập luận, tính toán ở trên, ta vẽ được ĐTVQ của hộp tốc độ máy mới
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 13
Đồ án thiết kế máy Đề số:
Hình 2.6 Đồ thị vòng quay của hộp tốc độ máy mới thiết kế.
2.2.5 Tính số răng các bánh răng của từng nhóm truyền
Phương pháp tính:
- Với nhóm truyền có cùng mô đun ta có công thức:
Zx fx
ix = '
=
Z x
gx
fx
Với là phân số tối giản
gx
fx
Z x= . E. K
f x+ g x
' gx
Z x= . E.K
f x+ gx
Trong đó: E : là số nguyên
K : là bội số chung nhỏ nhất (fx + gx ) trong một nhóm truyền
∑ Z=K . E : Tổng số răng trong cặp bánh răng
E ≥ Emin
Nếu trong nhóm truyền tăng tốc thì:
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 14
Đồ án thiết kế máy Đề số:
bđ Z min .(f x + g x ) 17.( f x + g x )
Emin = =
gx . K gx . K
Nếu trong nhóm truyền giảm tốc thì Emin được tính theo Ecđ
min
cđ Z min .(f x + g x ) 17.( f x + g x )
Emin = =
fx .K fx .K
- Với nhóm truyền không cùng mô đun
Giả sử trong nhóm truyền dùng 2 mô đun ( m1 ,m2 ) ta có
Tỷ số truyền 1 có m1 : Zi 1 + Z ' i1=∑ Z 1 : tổng số răng nhóm 1
Tỷ số truyền 2 có m2 : Zi 2 + Z ' i2 =∑ Z 2 : tổng số răng nhóm 2
2 A=∑ Z 1 . m1=∑ Z 2 . m2
A là khoảng cách trục
∑ Z 1 = m2 = e 2 ( phân số tối giản)
∑ Z 2 m1 e 1
∑ Z 1 . e 1= ∑ Z 2 . e 2
2.2.5.1 Tính toán cho nhóm truyền I: gồm 2 tỉ số truyền là i1 và i2.
f1
Ta có i1 = φ1 = 1,261 ≈ =
5
4 g1
i1
I
→f1 + g1 = 5 + 4 = 9 = 32
11 f 2
Ta có i2 = φ2 = 1,262 ≈ =
7 g2 i2
→f2 + g2 = 11 + 7 = 18 = 2. 32
Nếu ta gọi K1 là bội chung nhỏ nhất
(BCNN) của các tổng (fi + gi) (i =1;2) thì:
II
K1 = BCNN(9,18) = 2 x 32 = 18.
Z2
Ta thấy: bánh răng nhỏ nhất nằm ở tỉ số truyền i 2= ' , mà tỉ số truyền này là tăng
Z2
tốc, nên bánh răng Z2’ là bánh răng nhỏ nhất (bánh bị động).
BĐ Z min . (f 2 + g2 ) 17.(11+ 7) 17
Ta có: E ≥ = = ≈ 2,425.
K 1 . g2 18.7 7
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 15
Đồ án thiết kế máy Đề số:
Để tận dụng bánh răng làm vỏ ly hợp ma sát nên đường kính của bánh răng khoảng
100 mm, theo các máy đã có thì môdul bánh răng khoảng 2,5 nên bánh răng chủ động
chọn khoảng trên 50 răng đo đó tăng tổng số răng của cặp. Chọn EBĐ = 5.
Tổng số răng của từng tỉ số truyền là: ∑Z 1 = K1.EBĐ = 18.5 = 90 (răng), thoả mãn
điều kiện ∑Z ≤ 120 (răng).
Số răng của tỉ số truyền i1:
f1 BĐ 5
Z1 = . K1. E = .18 .5=50 (răng)
f 1 +g 1 5+4
' g1 BĐ 4
Z1 = . K1. E = .18 .5=40(răng )
f 1 +g 1 5+4
Z1 50 1
Kiểm tra lại điều kiện tỉ số truyền: i 1= '
=
40
=1 ,25 , thoả mãn điều kiện ≤i ≤ 2
Z 1
4
.
Số răng của tỉ số truyền i2:
f2 BĐ 11
Z 2= .K .E = .18.5=55(răng )
f 2 + g2 1 11+7
' g1 BĐ 7
Z 2= .K .E = .18.5=35(răng)
f 2 + g2 1 11+7
Z2 55
Kiểm tra lại điều kiện tỉ số truyền: i 2= '
=
35
=1,571, thoả mãn điều kiện
Z 2
1
≤i ≤ 2.
4
2.2.5.2 :Tính toán cho nhóm truyền II: gồm có 3 tỉ số truyền là i3, i4, i5.
Ta có i5
1 1 23 f 3
i3 = 4 = ≈ = f3 + g3 = 80
4
ϕ 1 ,2 6 57 g3 i4
1 1 31 f 4
i4 = = ≈ = f4 + g4 = 80
2 2
ϕ 1 , 26 49 g 4 i3
1 f5
i5 = 0 = = f5 + g 5 = 2
1 g5
Bội số chung nhỏ nhất K = 80
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 16
Đồ án thiết kế máy Đề số:
Ta thấy rằng tia có tỷ số truyền i 3 có độ nghiêng trái nhiều nhất vì vậy E min được tính
theo công thức Eminchủ
Z 33min
Emin =
f 3. K
Ta chọn E = 1 suy ra tổng số răng
f3 23
∑ Z = E.K = 1.80 = 80 Z3 =
f 3 + g3
. E . K=
23+57
.1.80 = 23 (răng)
Z3’ = 80 – 23 = 57 (răng)
f4 31
Z4 = . E . K= .1.80 = 31 (răng)
f 4+ g 4 31+49
Z4’ = 80 – 31 = 49 (răng)
f5 1
Z5 = . E . K= 1.80 = 40 (răng)
f 5 + g5 2
Z5’ = 80 – 40= 40 (răng)
Vậy số răng trong nhóm truyền II
Z3 = 23 (răng) ; Z3’ = 57 (răng)
Z4 = 31 (răng) ; Z4’ = 49 (răng)
và Z5 = 40 (răng) ; Z5’ = 40 (răng)
Kiểm tra sai số tỷ số truyền
Z3 23
i3 = '
= =0,407 (sai số 1.89%)
Z3 57
Z4 31
i4 = '
= =0,632 (sai số 0.42%)
Z4 49
Z5 38
i5 = '
= =1 (sai số 0%)
Z5 38
2.2.5.3 : Tính toán cho nhóm truyền III: gồm có 2 tỉ số truyền là i6 và i7.
i7
1 f6
Ta có i6 = φ = 1,26 ≈ =
-6 -6
4 g6
→ f6 + g 6 = 1 + 4 = 5
i6
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 17
Đồ án thiết kế máy Đề số:
1 f7
Ta có i7 = φ0 = 1,260 = =
1 g7
→ f7 + g 7 = 1 + 1 = 2 = 2
Nếu ta gọi K3 là bội chung nhỏ nhất (BCNN) của các tổng (fi + gi) (i =6;7) thì:
K3 = BCNN(5, 2) = 2 x 5 = 10.
Z6
Ta thấy: bánh răng nhỏ nhất nằm ở tỉ số truyền i 6= ' , mà tỉ số truyền này là giảm
Z6
tốc, nên bánh răng Z6 là bánh răng nhỏ nhất (bánh chủ động).
CĐ Z min .(f 6+ g 6) 17.(1+4 )
Ta có: E ≥ = =8 ,5. Chọn ECĐ = 11.
K 3. f 6 10.1
Tổng số răng của từng tỉ số truyền là: ∑Z3 = K3.ECĐ = 10.11 = 110 (răng), thoả mãn
điều kiện ∑Z ≤ 120 (răng).
Số răng của tỉ số truyền i6:
f6 CĐ 1
Z 6= .K . E = .10 .11=22( răng)
f 6 + g6 3 1+ 4
Z6’ = ∑Z3 – Z6 = 110 – 22 = 88 (răng)
Z6 22 1
Kiểm tra lại điều kiện tỉ số truyền: i 6= '
=
88
=0 , 25, thoả mãn điều kiện: ≤i ≤ 2.
Z 6
4
Số răng của tỉ số truyền i7:
f7 CĐ 1
Z7 = . K3 . E = .10.11=55(răng)
f 7 + g7 1+1
Z7’ = ∑Z3 – Z7 = 110 – 55 = 55 (răng)
Z7 55 1
Kiểm tra lại điều kiện tỉ số truyền: i 7= '
=
55
=1, thoả mãn điều kiện: ≤i ≤ 2.
Z 7
4
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 18
Đồ án thiết kế máy Đề số:
2.2.5.4 : Tính toán cho nhóm truyền IV: gồm 2 tỉ số truyền là i8 và i9:
1 f8 i9
Ta có i8 = φ-6 = 1,26-6 ≈ = i8
4 g8 IV
→f8 + g8 = 1 + 4 = 5
1 f9
Ta có i9 = φ0 = 1,260 = =
1 g7
→f9 + g9 = 1 + 1 = 2 = 2 V
Nếu ta gọi K4 là bội chung nhỏ nhất (BCNN) của các tổng (fi + gi) (i =8;9) thì:
K4 = BCNN(5, 2) = 2 x 5 = 10.
Z8
Ta thấy: bánh răng nhỏ nhất nằm ở tỉ số truyền i 8= ' , mà tỉ số truyền này là giảm
Z8
tốc, nên bánh răng Z8 là bánh răng nhỏ nhất (bánh chủ động).
CĐ Z min .(f 8+ g 8) 17.(1+4 )
Ta có: E ≥ = =8 ,5. Chọn ECĐ = 11.
K4.f8 10.1
Tổng số răng của từng tỉ số truyền là: ∑Z 4 = K4.ECĐ = 10.11 = 110 (răng), thoả mãn
điều kiện ∑Z ≤ 120 (răng).
Số răng của tỉ số truyền i8:
f8 CĐ 1
Z 8= .K4.E = .10 .11=22(răng)
f 8 + g8 1+4
Z8’ = ∑Z4 – Z8 = 110 – 22 = 88 (răng)
Z8 22 1
Kiểm tra điều kiện tỉ số truyền: i 8= '
=
88
=0 , 25,thoả mãn điều kiện: ≤i ≤ 2.
Z 8
4
Số răng của tỉ số truyền i9:
f9 CĐ 1
Z 9= .K4.E = .10 .11=55(răng)
f 9 + g9 1+1
Z9’ = ∑Z4 – Z9 = 110 – 55 = 55 (răng)
Z9 55 1
Kiểm tra lại điều kiện tỉ số truyền: i 9= '
=
55
=1, thoả mãn điều kiện: ≤i ≤ 2.
Z 9
4
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 19
Đồ án thiết kế máy Đề số:
2.2.5.5 :Tính toán cho nhóm truyền V: gồm 1 tỉ số truyền là i10.
1 f 10 i10
Ta có i10 = φ-3 = 1,26-3 ≈ = V
2 g10
→f10 + g10 = 1 + 2 = 3
Nếu ta gọi K5 là bội chung nhỏ nhất (BCNN)
của các tổng (fi + gi) thì:
VI
K5 = BCNN(3) = 3.
Z 10
Ta thấy: bánh răng nhỏ nhất nằm ở tỉ số truyền i 10= ' , mà tỉ số truyền này là giảm
Z 10
tốc, nên bánh răng Z10 là bánh răng nhỏ nhất (bánh chủ động).
CĐ Z min .(f 10 + g10 ) 17.(1+2)
Ta có: E ≥ = =17. Chọn ECĐ = 27.
K 5 . f 10 3.1
Tổng số răng của từng tỉ số truyền là: ∑Z 5 = K5.ECĐ = 3.27 = 81 (răng), thoả mãn
điều kiện ∑Z ≤ 120 (răng).
Số răng của tỉ số truyền i10 :
f 10 CĐ 1
Z10= . K5 . E = .3 .27=27 (răng)
f 10+ g 10 1+ 2
Z10’ = ∑Z5 – Z10 = 81 – 27 = 54 (răng)
Z 10 27 1
Kiểm tra điều kiện tỉ số truyền: i 8= '
=
54
=0 , 5, thoả mãn điều kiện : ≤i ≤ 2.
Z 10
4
2.2.5.6 :Tính toán cho nhóm truyền tốc độ cao: gồm có tỉ số truyền i11.
11 f 11
Ta có i11 = φ2 = 1,262 ≈ =
7 g 11
→f11 + g11 = 11 + 7= 18.
Dựa vào máy tham khảo 1K62, ta thấy trục III và trục V được chế tạo đồng trục nên
khoảng cách trục từ trục III đến
Trục VI (đường truyền trực tiếp) và khoảng cách trục từ trục V đến trục VI (đường
truyền gián tiếp) là bằng nhau.
Giả sử khoảng cách trục này là A và chọn modun của nhóm
truyền i10 là m1= 4, modun của nhóm truyền trực tiếp i11 là m2 = 3, ta có:
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 20
Đồ án thiết kế máy Đề số:
{
III
1 1
A= . m1 ( Z 10 +Z '10 ) = . m1 . ∑ Z 10
2 2
1 1
A= . m2 ( Z 11 + Z 11 )= . m2 . ∑ Z 11
'
i11
2 2
IV
=> m1 . ∑Z10 = m2 . ∑Z11
∑ Z 10 = m2 = 3 ¿> Z = Z . 4 =108
Hay: ∑ 10 3
∑ Z11 m1 4 11 V
11 7
Z11 = .108=66 Z ' 11 = .108=4 2
18 18
Z11 66
Kiểm tra điều kiện tỉ số truyền i 11= '
=
42
=1, 57 , thoả mãn VI
Z 11
1
điều kiện ≤i ≤ 2.
4
Kết quả tính toán số bánh răng của hộp tốc độ máy mới được tổng hợp ở bảng
Thứ tự nhóm truyền Tỉ số truyền Giá trị
Z1 Z1 = 50
i 1= '
Nhóm truyền 1 Z1 Z1’ = 40
(từ trục I tới trục II) Z2 Z2 = 55
i 2= '
Z2 Z2’ = 35
Z3 Z3 = 23
i 3= '
Z3 Z3’ = 57
Nhóm truyền 2 Z4 Z4 = 31
i4 = '
(từ trục II tới trục III) Z4 Z4’ = 49
Z5 Z5 = 40
i 5= '
Z5 Z5’ =40
Z6 Z6 = 22
i 6= '
Nhóm truyền 3 Z6 Z6’ = 88
(từ trục III tới trục IV) Z7 Z7 = 55
i 7= '
Z7 Z7’ = 55
Z8 Z8 = 22
i 8= '
Nhóm truyền 4 Z8 Z8’ = 88
(từ trục IV tới trục V) Z9 Z9 = 55
i 9= '
Z9 Z9’ = 55
Nhóm truyền 5 Z 10 Z10 = 27
i 10= '
(từ trục V tới trục VI) Z 10 Z10’ = 54
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 21
Đồ án thiết kế máy Đề số:
Nhóm truyền tốc độ cao Z11 Z11 = 66
i 11= '
(từ trục III tới trục VI) Z11
Z11’ = 42
Bảng 2.4 Số bánh răng cụ thể của từng nhóm truyền hộp tốc độ máy mới
2.2.6.Tính sai số, vẽ đồ thị sai số vòng quay
Sai số vòng quay của hộp tốc độ được tính theo công thức sau:
ni−TC −ni−thực
∆ ni %= ×100 %
ni−TC
Trong đó: ni-TC: tốc độ vòng quay tiêu chuẩn, được xác định từ dãy tốc độ tiêu chuẩn
cơ sở).
ni-thực: tốc độ vòng quay thực tế, được xác định từ ĐTVQ.
Và giá trị của sai số vòng quay sẽ không được vượt quá giá trị sai số vòng quay cho
phép [Δn]:
∆ ni % ≤ [ ∆ n ] =10 ( φ−1 ) %=10 ( 1 , 26−1 ) %=2 , 6 %
Kết quả tính các giá trị sai số vòng quay và đồ thị sai số vòng quay được thể hiện ở
bảng 2.11 và hình 2.11 sau đây:
TT Phương trình xích động ntt ntc Δn%
50 23 22 22 27
1 670. . . . . 10,56 10,5 −¿0,57
40 57 88 88 54
55 23 22 22 27
2 670. . . . . 13,28 13,2 0,9
35 57 88 88 54
50 31 22 22 27
3 670. . . . . 16,56 17 2,59
40 49 88 88 54
55 31 22 22 27
4 670. . . . . 20,82 21 0,86
35 49 88 88 54
50 40 22 22 27
5 670. . . . . 26,17 26,5 1,25
40 40 88 88 54
55 40 22 22 27
6 670. . . . . 32,9 33,5 1,79
35 40 88 88 54
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 22
Đồ án thiết kế máy Đề số:
50 23 55 22 27
7 670. . . . . 42,24 42 −¿0,57
40 57 55 88 54
55 23 55 22 27
8 670. . . . . 53,1 53 0,19
35 57 55 88 54
50 31 55 22 27
9 670. . . . . 66,23 67 1,15
40 49 55 88 54
55 31 55 22 27
10 670. . . . . 83,26 85 2,05
35 49 55 88 54
50 40 55 22 27
11 670. . . . . 104,69 105 0,24
40 40 55 88 54
55 40 55 22 27
12 670. . . . . 131,61 132 0,3
35 40 55 88 54
50 23 55 55 27
13 670. . . . . 168,97 170 0,61
40 57 55 55 54
55 23 55 55 27
14 670. . . . . 212,42 210 −¿1,15
35 57 55 55 54
50 31 55 55 27
15 670. . . . . 264,92 265 0,03
40 49 55 55 54
55 31 55 55 27
16 670. . . . . 333,05 335 0,58
35 49 55 55 54
50 40 55 55 27
17 670. . . . . 418,75 420 0,3
40 40 55 55 54
55 40 55 55 27
18 670. . . . . 526,43 530 0,67
35 40 55 55 54
55 23 66
19 670. . . 667,6 670 0,36
35 57 42
50 31 66
20 670. . . 832,62 850 2,04
40 49 42
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 23
Đồ án thiết kế máy Đề số:
55 31 66
21 670. . . 1046,72 1050 0,31
35 49 42
50 40 66
22 670. . . 1316,07 1320 0,3
40 40 42
55 40 66
23 670. . . 1654,49 1700 2,6
35 40 42
Bảng 2.5 Bảng tính toán sai số vòng quay
Ta có đồ thị sai số vòng quay:
Hình 2.7 Đồ thị sai số vòng quay
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 24
Đồ án thiết kế máy Đề số:
2.2.7. Sơ đồ động hộp tốc độ
55 50
I
88 55
31 23 55
II A
40
C IV 22
D
35 40
III V
49
B
VI 40
22 55
66 27 55
57 88
42
E
54
Hình 2.8 Sơ đồ động hộp tốc độ
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 25
Đồ án thiết kế máy Đề số:
2.3 THIẾT KẾ TRUYỀN DẪN HỘP CHẠY DAO
Yêu cầu đề bài:
HCD dùng cơ cấu Norton, khuếch đại ren i KĐ =32 ;
Ren hệ mét : tp = 1,5 ÷ 16 [mm]
Ren Anh : 24 ÷ 2
Ren mo đun : m = 0,5 ÷ 7
2.3.1. Yêu cầu kĩ thuật và đặc điểm hộp chạy dao
* Yêu cầu kỹ thuật:
- Số cấp chạy dao Zs phải đủ.
- Quy luật phân bố của các lượng chạy dao phân bố theo quy luật cấp số cộng. -
Phạm vi điều chỉnh của lượng chạy dao Smin Smax.
- Tính chất của lượng chạy dao liên tục.
- Độ chính xác của lượng chạy dao yêu câu chính xác cao.
- Độ cứng vững xích động nối liền giữa trục chính và trục kéo.
* So với hộp tốc độ hộp chạy dao có những đặc điểm sau:
- Công suất truyên bé thường chỉ băng (5 10)% công suất truyền dẫn chính. -
Tốc độ làm việc chậm hơn nhiều so với hộp tốc độ,do vậy cho phép sử dụng các
bộ truyền như là vít me-đai ốc(có hiệu suất thấp).
- Cho phép sử dụng bộ truyền có kết cấu không đòi hỏi độ cứng vững cao
- Lưới kết cấu không nhất thiết phải có hình rẻ quạt.
i sm ax 2 ,8
- Phạm vi điều chỉnh tỉ số truyền động: 1/5 is 2,8; Rs max = = 1/5 = 14
i imin
*PT tổng quát xích cắt ren:
1 vòng TC.ikđ.. i tt . i cs .i gb . t x =t p
o Ikđ : tỷ số truyền nhóm khuếch đại
o Itt : tỷ số tryền bánh răng thay thế
o Ics : tỷ số truyền tron nhóm cơ sở
o igb : tỷ số truyền nhóm gấp bội
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 26
Đồ án thiết kế máy Đề số:
Hộp chạy dao bao gồm ics và igb theo cơ cấu nortong và bánh răng di trượt.
Do tiện trơn không cần yêu cầu độ chính xác quá cao, chấp nhận được sai số nên
chúng ta yêu tiên thiết kế tính toán theo tiện ren trước.
2.3.2 Lập bảng xếp ren
Để thuận tiện cho việc gia công ren người ta đã cố tình tiêu chuẩn hóa ren theo nguyên
tắc:
Ren tiêu chuẩn được đặt theo dãy cấp số cộng có công sai không đều, không có
quy tắc thiết kế
Tiêu chuẩn hóa tạo ra các nhóm trị số ren có giá trị gấp đôi nhau nhằm tận dụng
để giảm kích thước hộp chạy dao, khi đó số bánh răng của hộp chạy dao là nhỏ
nhất
Ta sẽ xếp ren thành bảng có trị số gấp đôi nhau, khi đó tính tỉ số truyền để cắt ren
trong một cột, ta sẽ có nhóm truyền cơ sở i cs , sau đó qua một số nhóm truyền có
các giá trị gấp 2,4,8 để cắt tiếp cột bên
Theo yêu cầu thiết kế máy tiện ren vít vạn năng ta có các loại ren mà máy ta định thiết
kế có thể cắt được :
Ren hệ mét : tp = 1,5 ÷ 16
Khi đó theo dãy ren tiêu chuẩn ta có các thông số ren như sau: t p=1,5;
1,75;2 ;2,25 ;2,5 ;3 ;3,5 ;4 ;4,5 ;5 ;5,5 ;6 ;7 ;8 ;9 ;10 ;11 ;12 ;14;16.
25 , 4
Ren hệ Anh : n =24 ÷ 2, n= t ; t p là bước ren được cắt [mm].
p
Ta có: n = 24; 22; 20; 18; 16; 14; 13; 12; 11; 10; 9; 8; 7; 6; 5; 4,5; 4; 3,5;
3,25; 3; 2,75; 2,5; 2.
tP
Ren mô-đun : m = 0,5 ÷ 7, m= ; t p là bước ren được cắt [mm].
π
m = 0,5;0,75; 1; 1,25; 1,5; 2; 2,25; 2,5; 2,75; 3; 3,5; 4; 5; 5,5; 6; 7.
- Đầu tiên cần xếp bước ren được cắt thành nhóm cơ sở và những nhóm khuếch đại
1 1 1 1
với tỷ số truyền nhóm khuếch đại là 1; 2 ;4 ;8 hoặc ; ; ; , nghĩa là các tỷ số
1 2 4 8
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 27
Đồ án thiết kế máy Đề số:
khuếch đại hợp thành cấp số nhân có công bội là φ = 2. Khi sắp xếp cần chú ý
những điểm sau:
- Số hàng ngang phải ít nhất để cho số bánh răng của nhóm cơ sở Norton là ít nhất.
Nếu số bánh răng của nhóm này nhiều thì khoảng cách giữa 2 gối tựa của bộ
Norton càng xa, độ cứng vững càng kém.
- Ren Quốc Tế Ren Module
- 2,25 4,5 9 0,5 1 2 4
1,25 2,5 5 10 - - 2,25 4,5
- 2,75 5,5 11 - 1,25 2,5 5
1,5 3 6 12 - - - 5,5
- - - - 0,75 1,5 3 6
1,75 3,5 7 14 - - - -
2 4 8 16 - 1,75 3,5 7
1/8 1/4 1/2 1 1/8 1/4 1/2 1
Ren Anh Ren Pitch
16 8 4 2 - - - -
18 9 4,5 2,25 - - - -
20 10 5 2,5 - - - -
22 11 5,5 2,75 - - - -
24 12 6 3 - - - -
- 13 6,5 3,25 - - - -
- 14 7 3,5 - - - -
Bảng 2.6 Bảng xếp ren
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 28
Đồ án thiết kế máy Đề số:
- Nhóm cơ sở norton là 1 nhóm bánh răng có hình tháp, tương tự khi ta khảo sát
máy 1K62, cơ cấu norton căn khớp với một bánh răng, để cắt các bước ren khác
nhau thì ta thay đổi ăn khớp giữa bánh răng đó với các bánh răng khác nhau trên
cơ cấu norton.
- Nếu gọi số răng của các trên cơ cấu Norton lần lượt là Z 1, Z2, Z3… thì các bánh
răng này là để cắt ra các ren thuộc nhóm cơ sở, các trị số z i này cần là số nguyên
và có tỷ lệ đúng như tỉ lệ của các bước ren trong 1 cột trên bảng xếp ren
- Mặt khác zi không được quá lớn vì nó sẽ làm tăng kích thước của nhóm truyền.
- Khi cắt ren quốc tế cần có 6 bánh răng
Z1 :Z2 :Z3 :Z4 :Z5 :Z6= 9 : 10 : 11: 12: 14 :16
Do đó Z1 :Z2 :Z3 :Z4 :Z5 :Z6 = 36 : 40 : 44 : 48 :56 : 64
- Khi cắt ren modul cần có 6 bánh răng
Z1 :Z2 :Z3 :Z4 :Z5 :Z6 Z6 = 4 : 4,5 : 5 : 5,5 : 6 : 7
Do đó : Z1 :Z2 :Z3 :Z4 :Z5 :Z6 = 32 : 36 : 40 : 44 : 48 : 56
- Khi cắt ren Anh cần có 7 bánh răng:
Z1 :Z2 :Z3 :Z4 :Z5 : Z6 : Z7= 4 : 4,5 : 5 : 5,5 : 6 : 6,5 : 7
Do đó : Z1 :Z2 :Z3 :Z4 :Z5 :Z6 : Z7 = 32: 36: 40 : 44 : 48 : 52 : 56
Kết luận: để cắt được 4 loại ren trên thì số bánh răng trong bộ bánh răng hình tháp là:
Z1 :Z2 :Z3 :Z4 :Z5 :Z6 : Z7 =32 : 36 : 40 : 44: 48 : 56 : 64
Vậy bộ truyền bánh răng hình tháp gồm các bánh răng sau:
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 29
Đồ án thiết kế máy Đề số:
Hình 2.9 Cơ cấu nooctoong
2.3.3: Thiết kế nhóm gấp bội
Nhóm gấp bội phải tạo ra 4 tỉ số truyền với công bội =2. Chọn cột có các tỉ số truyền 8
; 9 ; 10 ; 11; 12 ; 14 làm nhóm cơ sở thì muốn tiện ra toàn bộ số ren có tỉ số truyền nhóm
gấp bội bằng: 1/8; 1/4; 1/2; 1.
Hộp chạy dao có công suất bé, hiệu suất thấp, các bánh răng có cùng môdul nên việc
chọn phương án thứ tự Mx trên các trục trung gian tăng dần không còn quan trọng nữa.
Mặt khác bánh răng có cùng môdul nên việc chọn PAKG để giảm cấp số vòng quay
không làm tăng kích thươc bộ truyền.
Do đó để đơn giản ta tham khảo máy chuẩn chọn ra PAKG & PATT
PAKG có thể chọn : Z = 4 = 2 x 2 = 4 x 1
Yếu tố so sánh Phương án
2x2 4x1
Tổng số bánh răng 8 10
Tổng số trục 3 3
Chiều dài trục 8b+7f 8b+7f
Số bánh răng chịu mômen xoắn 2 2
Bảng 2.7 Bảng so sánh PAKG
Nhận xét:
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 30
Đồ án thiết kế máy Đề số:
PAKG : 4x1 có số báng răng trên một trục nhiều, khó chế tạo. PAKG 2x2 là hợp lý
hơn.
Với PAKG : 2x2 có hai PATT
PAKG 2x2 2x2
PATT I II II I
Số đặc tính nhóm [X] [1] [2] [2] [1]
1 2 2 1
Lưới kết cấu của nhóm
Bảng 2.8 Bảng so sánh PATT:
Lượng mở cực đại [X]max 2 2
Ta có lưới kết cấu :
Hình 2.10 Lưới kết cấu nhóm gấp bội
Qua các bảng và hình vẽ, ta thấy PATT I – II có lưới kết cấu sít đặc, dạng mái nhà
nên sẽ cho kích thước nhỏ gọn và đảm bảo độ bền hơn.
Ta chọn PATT I – II
Tính các bánh răng của nhóm gấp bội
Chọn số răng và modun cho nhóm gấp bội ta lấy sao cho đảm bảo khoảng cách tâm A
(phụ thuộc vào m và z) phù hợp với nhóm cơ sở
- Nhóm 1: có đặc tính là 1 (φ 1=2) , để cho kết cấu bánh răng tương đối đồng đều thì
ta chọn tỷ số truyền của nhóm giảm xuống một chút (tương tự như máy 1K62),
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 31
Đồ án thiết kế máy Đề số:
mặc dù sau đó ta lại phải tăng tốc để có được tỷ số truyền i=1, nhưng mặt khác ta
lại tận dụng được báng răng dùng chung.
Ta chọn i 1=2/5 → i 2=4/5 vì i 1 :i 2=1 :φ
- Nhóm 2: đặc tính nhóm truyền là 2, tỷ số truyền không thể tự chọn được mà phải
lấy i 4 =5/4. Từ đó ta có i 3=5/16.
Nhóm 1:
2 f1
i 1= = → f 1+ g 1=7.
5 g1
4 f2
i 2= = → f 2+ g 2=9.
5 g2
Bội số chung nhỏ nhất của (fx + gx ) = 63.Vậy: K = 63.
Vì tia có tỷ số truyền nghiêng trái nhiều nhất do đó E min được tính theo bánh răng bị
động : Emin =E cđ
min .
cđ
17 ( f 1 + g1 ) 17.7
E ≥ Emin = = =0,944.
f1. K 2.63
Ta lấy: E = 1.
Vậy:∑ Z=K . E=1.63=63(răng).
f1 63
Z1 = . E . K= .2=18.
( f 1 + g1 ) 7
f1 63
Z ' 1= . E . K= .5=45.
( f 1 + g1 ) 7
f2 63
Z 2= . E . K= .4=28.
( f 2 + g2 ) 9
g2 63
Z ' 2= . E . K= .5=35.
( f 2 + g2 ) 9
Nhóm 2:
5 f3
i 3= = → f 3 + g3=21.
16 g 3
5 f4
i 4 = = → f 4 + g 4=9.
4 g4
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 32
Đồ án thiết kế máy Đề số:
Bội số chung nhỏ nhất của (fx + gx ) = 63.Vậy: K = 63.
Vì tia có tỷ số truyền nghiêng trái nhiều nhất do đó E min được tính theo bánh răng bị
động: Emin =E cđ
min .
cđ
17 ( f 3 + g3 ) 17.21 17
E ≥ Emin = = =
f 3. K 5.63 15
Ta lấy: E = 2. Vậy:∑ Z=K . E=2.63=126(răng)> 120 (răng) do đó ta phải tính lại số răng.
14(5+16) 14
Chọn Zmin =14 (răng) Emin = = 15 < 1
5.63
Chọn Emin = 1 Z = E.K = 1.63 = 63 (răng).
f3 5
Z3 = .E.K = .63 =15 (răng);
f 3 + g3 5+16
Z3’=Z - Z3 = 63 - 15 = 48 (răng).
f4 5
Z4 = .E.K = .63= 35 (răng);
f 4+ g 4 5+4
Z4’= Z - Z4 = 63 – 35 = 28 (răng).
i 1 2 3 4
Zi 18 28 15 35
Z 'i 45 35 48 28
Bảng 2.9 Bảng thống kê tỉ số truyền:
Vẽ đồ thị vòng quay
18 28 15 35
Ta có : i 1= ; i = ;i = ; i =
45 2 35 3 48 4 28
2
i1 = = x ⇒ x1 = -1,3 ⇒ tia i1 lệch sang trái 1 khoảng 1,3log
5
4
i2 = = x ⇒ x2 = -0,3 ⇒ tia i2 lệch sang trái 1 khoảng 0,3log
5
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 33
Đồ án thiết kế máy Đề số:
5
i3 = = x ⇒x3 = -1,7 ⇒ tia i3 lệch sang trái 1 khoảng 1,7log
16
5
i4 = = x ⇒x4 = 0,3 ⇒ tia i4 lệch sang trái 1 khoảng 0,3log
4
Ta có đồ thị vòng quay:
2.3.4 Tính các tỉ số truyền còn lại
Tỷ số truyền còn lại bao gồm các bánh răng phụ, bánh răng thay thế của hộp chạy
dao.
Ta có phương trình cắt ren tổng quát:
1 vòng tc. ibù. ics.igb .tv = tp
Trong đó ibù = ithaythế. icốđịnh
Nên phương trình có pt mới:
1 vòng tc. itt. icd. ics. igb. tv = tp
Trong đó:
ics : là tỷ số truyền của nhóm norton
igb: là tỷ số truyền của nhóm gấp bội
tv : là bước vít me.
tp : là bước ren được cắt
ibù : là tỷ số truyền còn lại bù vào xích động
Để tính ibù ta chọn cắt thử một bước ren nào đó :
❖ Cắt thử:
o Cắt ren quốc tế:
Ta thử cắt ren quốc tế tp = 5 mm
1
Qua bảng xếp ren ta có igb =
2
Tham khảo máy 1K62 ta chọn tx = 12 mm, Z0 = 36 răng
Z 5 40
Thì i cs= = (Norton chủ động)
Z o 36
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 34
Đồ án thiết kế máy Đề số:
40 1
Do đó: ibù . . . 12 = 5
36 2
tp 5 3
i bù= = =
⇨ t v . i cs .i gb 40 1 4
12. .
36 2
25
Dựa vào máy 1K62 chọn icđ =
28
Vì ibù = ithaythế. icốđịnh nên:
3 25 42
=itt . →i tt =
4 28 50
o Cắt thử ren Anh:
Bộ bánh răng thay thế để cắt ren Quốc tế cũng được dùng chung để cắt ren Anh.
Nhưng khi cắt ren Anh, xích cắt ren đi theo một đường khác.
Cho cắt thử ren Anh có n = 4. Bánh noocton bị động
25 , 4 25 , 4
t p= = =6 , 35(mm)
n 4
Dựa vào bảng xếp ren ta có:
Z 0 36
i cs= =
Z i 32
1
i gb=
2
42
i tt =
50
Thay vào công thức ta có:
o Cắt thử ren modun:
Ta cắt thử ren với m = 3, ta có tp = π. m = π. 3
1 Z i 44 25
Với m = 3 : i gb= ; i cs= = ; i cd =
2 Z 0 36 28
tp 3. π 72
⇒ i tt = = ≈
i cđ .i cs . i gb . t x 25 44 1 50
. . .12
28 36 2
Ta có các tỷ số truyền thay thế là:
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 35
Đồ án thiết kế máy Đề số:
- Để cắt ren Quốc tế và ren Anh:
- Để cắt ren Modun
72 95
i tt = .
95 50
❖ Tính sai số bước ren
Do sai số trong các bước tính toán, cần tiến hành kiểm tra sai số bước ren về mặt thiết
kế. Ta tiến hành kiểm tra cho từng loại ren riêng biệt, mỗi loại ren chỉ cần kiểm tra một
bước. Nếu sai số một bước ren trong loạt ren đó đạt yêu cầu thì các bước ren còn lại cũng
sẽ đạt.
Sai s bc ren tp= |t’p-tp | [t p]
Vi [t p ] là sai s cho phép ca bc ren, có th ly [t p ] =0,1 d 0 (dung sai đường
kính trung bình của ren). Thông thường có thể so sánh với sai số bước ren máy tham
khảo để đánh giá kết quả tính toán.
- Ren quốc tế
Z 3 40 25 42
Với tp = 10;i gb=1; i cs= = ; i cd = ;i tt =
Z 0 36 28 50
Ta có phương trình xích động học:
1 vòng tc.itt .igb .ics .tx = tp
42 25 40
→ . . .1.12=10
50 28 36
→ Không có sai số
- Ren modun.
Với m = 3 , tp = m. = 3. 1.3,1416 = 9,4248
Z 4 44 25 36
i gb=1 ; i cs= = ; i cd = ;i tt =
Z 0 36 28 25
72 25 48 1
. . . .12=9,4286
50 28 36 2
Sai số 0,0038 (so với sai số của máy tham khảo 1K62 là 0,0008 là lớn hơn nhưng
vẫn chấp nhận được).
- Ren Anh:
Với n = 6
25 , 4 25 , 4
→ t p= = =4,2333
n 6
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 36
Đồ án thiết kế máy Đề số:
1 Z 0 36 28 42
i gb= ; i cs= = ; i cd = ;i tt =
2 Z 6 48 25 50
42 28 36 1
→ . . . .12=4,2336
50 25 48 2
Sai số 0,0003 (so với sai số của máy tham khảo 1K62 cũng là 0,0003).
Nhận xét: khi cắt ren có sai số nhưng sai số rất nhỏ nên có thể chấp nhận được.
2.3.5 Xác định thông số tiện trơn:
Phương trình xích tiện trơn
1vt/c.itt.icđ.ics.igb.ixd= S [mm/vg]
Do các tỉ số truyền ở hộp chạy dao là cố định nên ta sẽ thay đổi tỉ số tryền trên hôp xe
dao để đảm bảo yêu cầu đề bài.
Theo đầu bài lượng chạy dao : Smin (dọc)=2Smin(ngang)=0,08 [mm/vg]
Theo máy 1K62, khi đó ta có các phương trình cân bằng như sau:
28 28 27 20 4 40 14
1vt/c. .itt.icđ.ics.igb. . . . . . . π .3 .10 = Sdọc
56 56 20 28 20 37 66
28 28 27 20 4 40 40 61
1vt/c. .i .i .i .i . . . . . . . .5 = Sngang
56 tt cđ cs gb 56 20 28 20 37 61 20
Lượng chạy dao của máy tiện 1K62: : Smin (dọc)=2Smin(ngang)=0,07 [mm/vg]
Từ các phương trình trên ta thấy khi cơ cấu Noorton chủ động có Z n=32 64 và
igb=1/8 đều cho giá trị khác yêu cầu . Vậy ta phải điều chỉnh một số cặp bánh răng trong
hộp xe dao để đảm bảo yêu cầu .Tuy nhiên để dảm bảo khoảng cách trục như máy chuẩn
ta phải giữ nguyên Z=const .
Ta thay thế 1 bánh răng trong hộp xe dao là Zn:
28 Zn 20 4 40 14
i xd 1= . . . . . . π .3 .10
56 20 28 20 37 66
Ta chọn con đường đi qua itt=42/50 , icđ ¿25/28, ics ¿32/36, igb ¿1/8 (cơ cấu Noorton chủ
động ta được:
28 42 25 32 1 28 Zn 20 4 40 14
Sdọcmin= . . . . . . . . . . . π .3 .10 =0,0032.Zn=0,08
56 50 28 36 8 56 20 28 20 37 66
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 37
Đồ án thiết kế máy Đề số:
Zn=25
Lúc đó:
28 42 32 25 1 28 25 20 4 40 14
Sdọc min= . . . . . . . . . . . π .3 .10 0.08 (mm/vg)
56 50 36 28 8 56 20 28 20 37 66
28 42 32 25 1 28 25 20 4 40 40 61
S ng min= . . . . . . . . . . . .5 0.04 ( mm/vg)
56 50 36 28 8 56 20 28 20 37 61 20
28
Kết luận : Toàn bộ đường tiện trơn sẽ đi theo đường tiện ren qua cặp bánh răng vào
56
hộp xe dao. Do đó đường tiện trơn là hệ quả của đường tiện ren,bước tiện trơn dày hơn
nhiều so với bước tiện ren tiêu chuẩn.
Hình 2.11 Sơ đồ động học hộp chạy dao
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 38
Đồ án thiết kế máy Đề số:
Hình 2.12 Sơ đồ động học hộp xe dao
CHƯƠNG III :TÍNH TOÁN CÔNG SUẤT, SỨC BỀN CHO MỘT SỐ
CƠ CẤU CHÍNH
3.1. Xác định các lực tác dụng trong truyền dẫn
3.1.1. Xác định chế độ làm việc giới hạn của máy
Chế độ làm việc của máy bao gồm chế độ cắt gọt, chế độ bôi trơn làm lạnh, an
toàn… Một máy mới đã thiết kế, chế tạo xong phải quy định rõ ràng về chế độ làm việc
của máy trước khi đưa vào sản xuất. Trong mục này chỉ xác định chế độ cắt gọt giới hạn
của máy làm cơ sở tính toán động lực học máy cắt kim loại. Hiện nay, có nhiều phương
pháp xác định chế độ cắt gọt giới hạn khác nhau: chế độ cắt gọt cực đại, chế độ cắt gọt
tính toán, chế độ cắt gọt để thử máy.
3.1.1.1 Chế độ cắt gọt cực đại:
● Theo kinh nghiệm tính s, v, t bằng các công thức
t max=C . √ d max
3
Trong đó C = 0,7 đối với thép
dmax – đường kính lớn nhất của chi tiết gia công được trên máy mới, tham khảo máy 1K62
ta có dmax = 400( mm)
t max=C . √ d max=0 , 7. √ 400=5 ,16 [mm ]
3 3
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 39
Đồ án thiết kế máy Đề số:
Sử dụng chế độ cắt gọt cực đại sẽ dẫn đến toàn bộ chi tiết máy làm việc với tải
cực đại, tăng kích thước và trọng lượng máy. Thực tiễn chứng tỏ rằng người công nhân
không cho máy làm việc hết tải trọng. Độ bóng, độ chính xác, trình độ nghề nghiệp và
những yếu tố khác là nguyên nhân hạn chế khả năng sử dụng của máy. Để tính toán hợp
lý hơn có thể dùng chế độ cắt gọt tính toán.
3.1.1.2 Chế độ cắt gọt tính toán:
Chuỗi vòng quay n của máy biến đổi từ n min - nmax , Z cấp độ khác nhau. Chuỗi
lượng chạy dao S biến đổi từ Smin - Smax , Z cấp độ khác nhau. Tại các trị số n min ,Smin máy
làm việc với Mxmax
Vì vậy phải xác định trị số ntính , Stính theo công thức:
ntính =nmin
√
4 nmax
nmin
3.1.1.3 Chế độ cắt gọt thử máy.
Chế độ thử máy là do người thiết kế hoặc nhà máy sản xuất quy định. Trước khi đưa
máy mới vào sản xuất, nhà máy chế tạo phải nghiệm thu máy theo một chế độ kiểm
nghiệm nhất định. Thử máy có tải với các chế độ cắt nhanh, cắt mạnh mục đích để kiểm
tra các cơ cấu và chi tiết máy làm việc ổn định. Nếu nơi sử dụng máy làm việc với chế độ
cắt cao hơn, các cơ cấu và chi tiết máy bị hư hỏng, nhà máy chế tạo sẽ không chịu trách
nhiệm, vì vậy ta có thể chọn chế độ thử máy để tính toán sức bền các chi tiết máy mới
tương tự với máy đã sản xuất.
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 40
Đồ án thiết kế máy Đề số:
3.1.2.Xác định lực tác dụng trong truyền dẫn
Vì phần thiết kế máy mới ta đã sử dụng máy 1K62 làm máy tham khảo nên ta chọn chế
độ cắt gọt thử máy 1K62 để tính toán động lực học của toàn máy
Xác định lực cắt Pc và lực chạy dao Q:
Phân tích các thành phần lực tác dụng lên cơ cấu chấp hành:
Hình 3.1 Thành phần lực tác dụng lên cơ cấu chấp hành
Lực cắt P= P x + P y + ⃗Pz
⃗ ⃗ ⃗
Với : Px : thành phần lực dọc trục
Py : thành phần lực hướng tâm
Pz : thành phần lực tiếp tuyến
● Công thức tính lực cắt:
PX = C. tX.sY
PY = C. tX.sY
PZ = C. tX.sY
● Trong đó:
⮚ C : hệ số kể đến sự ảnh hưởng của tính chất vật liệu gia công.
⮚ t : chiều sâu cắt [mm]
⮚ s : lượng chạy dao [mm/vg]
a) Thử có tải
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 41
Đồ án thiết kế máy Đề số:
Tham khảo Chế độ thử máy ở nhà máy Cơ khí Hà Nội (TTTKMCKL-trang 219) với
máy T620 ta chọn chế độ thử có tải sau:
Thông số chế độ cắt:
⮚ Đường kính phôi:∅ 115[mm ]
- Chiều dài chi tiết: l = 200 [mm].
- Vật liệu phôi là thép 45.
- Độ cứng bề mặt phôi HRB=207
- Vật liệu dao cắt là thép gió P18.
- Tốc độ trục chính n :42 [vg/ ph].
- Bước tiến dao : s = 1,28 [mm/vg].
- Chiều sâu cắt t = 6 [mm].
Theo công thức trên, các hệ số C, x, y tra bảng II – 1(T90) ta có
Các lực thành phần:
P x =650.6 .1 , 28 =6552, 11 [ N ]
1 ,2 0 ,65
=7544 , 9 [ N ]
0 ,9 0 , 75
P y =1250. 6 .1 , 28
=14440 , 72 [ N ]
1, 0 0 ,75
P z=2000. 6 . 1 ,28
b) Thử công suất
- Dao tiện T15K6 Thông số chế độ cắt:
- Đường kính phôi Ø 70 [mm]
- Chiều dài chi tiết l = 350 [mm]
- Vật liệu phôi: thép 45
- Tốc độ trục chính n = 420 [vg/ph].
- Bước tiến dao s = 0,4 [mm/vg]
- Chiều sâu cắt t = 5 [mm].
Tương tự như trên ta tính được các lực thành phần như sau
=2471, 82 [ N ]
1, 2 0 ,65
P x =650.5 .0 , 4
=2676 ,26 [ N ]
0,9 0 ,75
P y =1250. 5 .0 , 4
1 ,0 0 ,75
P z=2000. 5 .0 , 4 =5029 , 73[N ]
c) Tính momen xoắn của động cơ
Trong hộp tốc độ, khi máy làm việc M x của động cơ điện ( M xdc ) phải cân bằng với M x lực
cắt ( M x ) và M x ma sát ( M xms ) trong các cặp truyền động:
Pc
n
M xdc = i0 . M x + ∑ M xms. ik
Pc
i=1
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 42
Đồ án thiết kế máy Đề số:
Mx
hay M xdc = Pc
.i 0
η
Trong đó: i0 - tỷ số truyền tổng cộng của xích
ik - tỷ số truyền từ cặp có M xms tới trục chính
η - Hiệu suất chung của bộ truyền dẫn ;η = 0,70 ÷ 0,85;
lấy η = 0,8
M x - mômen xoắn do lực cắt gây ra:
Pc
d
M x =P z .
Pc
2
- Chế độ thử có tải:
115
M x =14440 , 72. =830341.4[ N . mm]
Pc
2
42
i0
M xdc = Mx . = 830341.4 . 1440 = 30272,86 [N.mm]
η
Pc
0,8
- Khi thử công suất:
Mx 70
xPc = 4047 ,35 . = 141657,25 [N.mm]
Pc
2
42
i0
M xdc = MxPc . = 141657,25. 1440 = 5164,59 [N.mm]
η
0,8
3.2. Tính công suất động cơ điện
3.2.1 Xác định động cơ truyền dẫn chính
Công suất động cơ gồm có : Nđc = NC + N0 + NP
Trong đó: NC - công suất cắt
N0- công suất chạy không
NP - công suất phụ tiêu hao do hiệu suất và do những nguyên nhân ngẫu
nhiên ảnh hưởng đến sự làm việc của máy.
Công suất động cơ điện phải khắc phục ba thành phần công suất trên, bảo đảm cho máy
làm việc ổn định.
Thường NC chiếm 70 ÷ 80% Nđc , cho nên có thể tính gần đúng công suất động cơ
điện theo công suất cắt .
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 43
Đồ án thiết kế máy Đề số:
Nc
N dc = [kW ]
η
Với : η - hiệu suất chung của bộ truyền dẫn ; η = 0,70 ÷ 0,85 , lấy η = 0,8
3.2.2.Tính công suất cắt
Pz . v
N c= [kW ]
60.102 .9 ,81
Trong đó: P z - lực cắt chọn [N]
v - tốc độ cắt chọn [m/ph]
Ta có :
π . d . n π .70 .420
v= = = 92,36 [m/ph]
1000 1000
Pz . v 5029 ,73.92 , 36
Nc = = = 7,74 [kW]
60.102.9 , 81 60.102.9 , 81
Vậy công suất gần đúng của động cơ điện được tính qua công suất cắt
N c 7 , 74
N dc = = =9 ,7 [kW ]
η 0,8
Do đó ta chọn động cơ điện theo tiêu chuẩn Ndc = 10 [kW]
3.3 Tính đường kính trục sơ bộ và lập bảng thông số động lực học
Để lập bảng tính toán động lực ta cần biết:
+ Tốc độ lớn nhất và nhỏ nhất trên từng trục, từ đó ta có thể tính ra tốc độ trục tính toán
theo công thức:
√
ntính = nmin
4 nmax vg
nmin
[ /ph]
+ Công suất trên từng trục:
Ntrục = Nđc.η [kW]
Với η là hiệu suất của các bộ truyền, chi tiết từ động cơ tới trục. η = ∏η i với ηi là hiệu
suất của các bộ truyền đai, bánh răng, ổ lăn... ta có:
ηđai = 0,985; ηbr = 0,97; ηổ = 0,99; ηtc=0,88.
+ Mô men xoắn tính toán trên từng trục:
N truc
Mx tính = 9,55.106. [Nmm]
n tính
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 44
Đồ án thiết kế máy Đề số:
+ Đường kích sơ bộ của các trục:
dsơ bộ = C .
√
3 N trục
n tính
(mm); chọn C = 120.
Từ đó ta có bảng tính toán động lực:
Trục I NI = Nđc . ηđai .ηol = 10.0,985.0,99 9,75 KW
Trục II NII = NI. ηol . ηbr = 9,75.0,99.0,97 9,36 KW
Trục III NIII = NII . ηbr . ηol = 9,36. 0,97.0,99 9 KW
Trục IV NIV = NIII . ηbr . ηol = 9.0,97.0,99 8,63 KW
Trục V NV = NIV . ηbr . ηol = 8,63.0,97.0,99 8,29 kW
Trục VI NVI = NV . ηbr . ηol = 8,29. 0,97.0,99 7,96 kW
Số vòng quay
Do các trục quay với số vòng quay thay đổi từ n min đến nmax cho nên khi máy làm
việc ở các cấp tốc độ thấp máy được làm việc đến mômen xoắn giới hạn, không làm việc
hết công suất N. Để tính toán hợp lý thì người ta dùng chế độ cắt gọt tính toán, lấy số
vòng quay tính toán trên từng trục là
Trục I nI = 670 [vg/ph]
50
Trục II nIImin = nI.i1 =670. = 837,5 [vg/ph]
40
55
nIImax = nI.i2 =670. = 1052,86 [vg/ph]
35
√
nt2 = nmin
4 nmax
nmin
=886,81 [vg/ph]
23
Trục III nIIImin = nIImin .i 3= 837,5. = 337,94 [vg/ph]
57
40
nIIImax = nIImax .i 5= 1052,86. = 1052,86 [vg/ph]
40
nt3 = nmin
√
4 nmax
nmin
=448,98 [vg/ph]
22
Trục IV nIVmin = nIIImin .i 6= 337,94. = 84,49 [vg/ph]
88
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 45
Đồ án thiết kế máy Đề số:
55
nIVmax = nIIImax .i 7= 1052,86. = 1052,76 [vg/ph]
55
nt4 = nmin
√ 4 nmax
nmin
= 158,74 [vg/ph]
22
Trục V nV min = n IVmin . i8 = 84,49. = 21,12 [vg/ph]
88
55
nV max =nIV max . i9 = 1052,86. = 1052,86 [vg/ph]
55
nt5 = nmin
√
4 nmax
nmin
=56,12 [vg/ph]
27
Trục VI nVI min = n Vmin . i10 = 21,12. = 10,56 [vg/ph]
54
66
nVI max = nmax = 1052,86. = 1654,49 [vg/ph]
42
nt6 = nmin
√ 4 nmax
nmin
=37,36 [vg/ph]
* Từ các mô men xoắn trên các trục ta xác định được đường kính sơ bộ của trục:
Theo công thức (7.1) trang114 (sách tính toán thiết kế hệ dẫn động cơ khí Nguyễn Trọng
Hiệp )
d sb =C .
√
3 N trục
ntính
với C=100
d sb1=100.
√ 3 9 ,75
670
=24 , 41(mm)
d sb2=100.
√
3 9 ,36
886 ,81
=21 , 93( mm)
d sb3=100.
√
3 9
448 , 98
=27 , 16(mm)
d sb4 =100.
√
3 8 , 63
158 , 74
=37 , 88(mm)
d sb5=100.
3
√ 8 , 29
56 ,12
=52 , 86(mm)
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 46
Đồ án thiết kế máy Đề số:
d sb6 =100.
√
3 7 ,96
37 ,36
=59 ,83 (mm)
Ta có bảng tính sơ bộ đường kính trục:
Thông Nmax Nmin ntính Ntrục Mtính dsơ bộ dchọn
số [vg/ph] [vg/ph] [vg/ph] [kW] [Nmm] [mm] [mm]
Trục
Động cơ 1440 1440 1440 10,00 66319 19,08 25
I 670 670 670 9,75 131144 24 , 41 35
II 1052,86 837,5 886,81 9,36 100797 21,93 30
III 1052,86 337,94 448,98 9 191441 27 , 16 35
IV 1052,86 84,49 158,74 8,63 519192 37,88 45
V 1052,86 21,12 56,12 8,29 1410718 52 , 86 55
VI 1654,49 10,56 37,36 7,96 2034743 59,83 75
Bảng 3.1 Bảng thông số chọn đường kính sơ bộ
Kết luận: Các đường kính được chọn ở bảng trên là các đường kính tiêu chuẩn tại
các tiết diện lắp ổ lăn và ổ bi. Tại các tiết diện khác,ta có thể lấy tăng giảm tùy thuộc vào
kết cấu và lực tác dụng.
Giảng viên hướng dẫn Sinh viên thực hiện
Trang | 47
You might also like
- Bài Tập Lớn: Kỹ Thuật Chế Tạo MáyDocument14 pagesBài Tập Lớn: Kỹ Thuật Chế Tạo MáyHoàng Đức100% (1)
- Đồ Án Công Nghệ Chế Tạo MáyDocument15 pagesĐồ Án Công Nghệ Chế Tạo MáyTrầnThếCường50% (2)
- Ngô Minh Hồng - Đa MáyDocument112 pagesNgô Minh Hồng - Đa MáyPhong FuujinNo ratings yet
- 23 NGUYỄN-HOÀNG-TUẤN 19519121Document41 pages23 NGUYỄN-HOÀNG-TUẤN 19519121tuấn nguyễnNo ratings yet
- 02. Máy Tiện T616Document65 pages02. Máy Tiện T616TungNguyenNo ratings yet
- Hoangthuthao 3Document13 pagesHoangthuthao 3learnit learnitNo ratings yet
- biển-lý thuyết ô tôDocument27 pagesbiển-lý thuyết ô tôTrịnh Quang KhảiNo ratings yet
- PhamVanTay 1900008932 ĐACTMDocument15 pagesPhamVanTay 1900008932 ĐACTMthé phụm hoàngNo ratings yet
- Đ Án MáyDocument90 pagesĐ Án MáyHữu CôngNo ratings yet
- Tailieuxanh Thiet Ke Do An 4034Document64 pagesTailieuxanh Thiet Ke Do An 403418118135No ratings yet
- DUY TIếnDocument74 pagesDUY TIếnMinh TrịnhNo ratings yet
- THIẾT KẾ ĐỘNG HỌC HỘP TỐC ĐỘ MÁY TIỆNDocument81 pagesTHIẾT KẾ ĐỘNG HỌC HỘP TỐC ĐỘ MÁY TIỆNViệt Hưng NguyễnNo ratings yet
- ĐỒ ÁN MÁY CẮT 1Document46 pagesĐỒ ÁN MÁY CẮT 1Việt Hưng NguyễnNo ratings yet
- - Họ và tên sinh viên: Vương Đình Cường - 21104900276 Vũ Tiến Hưng - 21104900255 Nguyễn Bá Việt Anh - 21104900079 Lớp: DHCD15A5Document12 pages- Họ và tên sinh viên: Vương Đình Cường - 21104900276 Vũ Tiến Hưng - 21104900255 Nguyễn Bá Việt Anh - 21104900079 Lớp: DHCD15A5Viet AnhNo ratings yet
- Hoangthuthao 4Document11 pagesHoangthuthao 4learnit learnitNo ratings yet
- Tính toán động cơ và tỷ số truyềnDocument7 pagesTính toán động cơ và tỷ số truyềnSơn NamNo ratings yet
- THUYẾT MINH FINAL 2Document54 pagesTHUYẾT MINH FINAL 2Dung TruongNo ratings yet
- CTM4 - Pa7 Xong..Document38 pagesCTM4 - Pa7 Xong..dinhhoaduong26102003No ratings yet
- Bài Tập Lớn Cơ Học MáyDocument19 pagesBài Tập Lớn Cơ Học MáyTrúc Thái ThanhNo ratings yet
- Dong 1Document7 pagesDong 111. Hoàng Trần LộcNo ratings yet
- (123doc) - Do-An-Dong-Co-Dot-Trong-Ve-Dong-Co-Diesel-Ve-He-Thong-Nhien-Lieu-Co-Kem-Ban-Excel-Thuyet-Minh-Va-CadDocument59 pages(123doc) - Do-An-Dong-Co-Dot-Trong-Ve-Dong-Co-Diesel-Ve-He-Thong-Nhien-Lieu-Co-Kem-Ban-Excel-Thuyet-Minh-Va-CadTrương Công ĐạtNo ratings yet
- Giới thiệu: SV:Nguyễn Mạnh CườngDocument68 pagesGiới thiệu: SV:Nguyễn Mạnh Cườngduc anhNo ratings yet
- TKMCC 1Document92 pagesTKMCC 1Dat NguyenNo ratings yet
- Đồ Án Thiết Kế Cơ KhíDocument46 pagesĐồ Án Thiết Kế Cơ KhíViệt LộNo ratings yet
- Thuyết minh tổng thể PBL2Document181 pagesThuyết minh tổng thể PBL2Thành Long NguyễnNo ratings yet
- Đồ Án Thiết Kế Cơ KhíDocument47 pagesĐồ Án Thiết Kế Cơ KhíViệt LộNo ratings yet
- Chuong 7 - Tu Dong Hoa Thiet KeDocument24 pagesChuong 7 - Tu Dong Hoa Thiet Kenguyễn văn dũngNo ratings yet
- Đồ án máy tiệnDocument78 pagesĐồ án máy tiệnhoangNo ratings yet
- EmtyDocument61 pagesEmtyTy CoonNo ratings yet
- Thuyết minh PBL nhóm 6Document42 pagesThuyết minh PBL nhóm 6Ngọc HuyNo ratings yet
- Phần 1. Xây Dựng Đồ Thị Công, Động Và Động Lực HọcDocument88 pagesPhần 1. Xây Dựng Đồ Thị Công, Động Và Động Lực HọcDung TruongNo ratings yet
- Thuyết Minh Đồ Án TKMCCDocument88 pagesThuyết Minh Đồ Án TKMCCNguyễn Thế NgọcNo ratings yet
- ĐỒ ÁN CHI TIẾT MÁYDocument69 pagesĐỒ ÁN CHI TIẾT MÁYLương Thế QuânNo ratings yet
- D An CHI TIT MAY HGT 2 CP Khai Trin PDFDocument48 pagesD An CHI TIT MAY HGT 2 CP Khai Trin PDFKim Long VoNo ratings yet
- Bùi Trí Tài - 1713000 - Thuyết MinhDocument57 pagesBùi Trí Tài - 1713000 - Thuyết MinhTai Bui TriNo ratings yet
- D An CHI TIT MAY HGT 2 CP Khai TrinDocument48 pagesD An CHI TIT MAY HGT 2 CP Khai TrinPhi Hùng TrầnNo ratings yet
- To Nghia NhanDocument64 pagesTo Nghia NhanVINH TRẦN THẾNo ratings yet
- đồ án tham khảoDocument61 pagesđồ án tham khảoLinh LêNo ratings yet
- (123doc) - Do-An-Dong-Co-Dot-Trong-Ve-Dong-Co-Diesel-Ve-He-Thong-Nhien-Lieu-Co-Kem-Ban-Excel-Thuyet-Minh-Va-CadDocument56 pages(123doc) - Do-An-Dong-Co-Dot-Trong-Ve-Dong-Co-Diesel-Ve-He-Thong-Nhien-Lieu-Co-Kem-Ban-Excel-Thuyet-Minh-Va-CadTrương Công ĐạtNo ratings yet
- Đồ án Nguyên lý - Chi tiết máy - đề số 3 - hộp giảm tốc phân đôi cấp chậmDocument50 pagesĐồ án Nguyên lý - Chi tiết máy - đề số 3 - hộp giảm tốc phân đôi cấp chậmTrần Minh Mẫn0% (1)
- Nguyen Van An - 20185970 - Do An 7Document48 pagesNguyen Van An - 20185970 - Do An 7ngô bíNo ratings yet
- Thuyết Trình Đồ Án Ctm - Đỗ Việt Anh - 70dcot11017Document51 pagesThuyết Trình Đồ Án Ctm - Đỗ Việt Anh - 70dcot11017duc anhNo ratings yet
- BÁO KHOA HỌC - Đặng - Hoài - Bảo - 1800602Document10 pagesBÁO KHOA HỌC - Đặng - Hoài - Bảo - 1800602Bảo ĐặngNo ratings yet
- bản báo cáo tham khảo tính toán đcdtDocument58 pagesbản báo cáo tham khảo tính toán đcdttqc proNo ratings yet
- Bài tham khảo 2Document34 pagesBài tham khảo 2Thái Quốc HuyNo ratings yet
- thuyết minh 1Document71 pagesthuyết minh 1Trần Duy CảnhNo ratings yet
- PBL1-Thiết Kế Truyền Động Cơ KhíDocument45 pagesPBL1-Thiết Kế Truyền Động Cơ Khíngoquanganh1111No ratings yet
- BÁO CÁO BÀI TẬP LỚN CHI Tiết MÁY: Đại Học Quốc Gia Thành Phố Hồ Chí Minh Trường Đại Học Bách Khoa Khoa Cơ KhíDocument38 pagesBÁO CÁO BÀI TẬP LỚN CHI Tiết MÁY: Đại Học Quốc Gia Thành Phố Hồ Chí Minh Trường Đại Học Bách Khoa Khoa Cơ KhíHoang NguyenNo ratings yet
- DoanDocument60 pagesDoanthanhngan17102No ratings yet
- Nguyễn Phương Nam -191332878-Đề 10pa3-Đã Chuyển ĐổiDocument78 pagesNguyễn Phương Nam -191332878-Đề 10pa3-Đã Chuyển ĐổiQuang Trần MinhNo ratings yet
- Trần Việt Anh211302389 ktck3.Document12 pagesTrần Việt Anh211302389 ktck3.do4953815No ratings yet
- Đoàn Bá Linh N7Document31 pagesĐoàn Bá Linh N7Đạt TrầnNo ratings yet
- Thuyet MinhDocument38 pagesThuyet Minhhien93693No ratings yet
- Đồ Án Thiết Kế Máy Đại Học Bách Khoa TP.hcm (Kèm Bản Vẽ Autocad Full) 3828566Document26 pagesĐồ Án Thiết Kế Máy Đại Học Bách Khoa TP.hcm (Kèm Bản Vẽ Autocad Full) 3828566Tieu Ngoc LyNo ratings yet
- OZOqKOU Do An Thiet Ke He Thong Truyen Dong Co KhiDocument53 pagesOZOqKOU Do An Thiet Ke He Thong Truyen Dong Co KhiĐinh Đức DuyNo ratings yet
- Thuyết Minh HGT 1 cấp răng thẳng 1 xích 1 đaiDocument63 pagesThuyết Minh HGT 1 cấp răng thẳng 1 xích 1 đaiPhong TrươngNo ratings yet
- Lương Thanh Thái Máy Phay Ngang V N Năng C TrungDocument27 pagesLương Thanh Thái Máy Phay Ngang V N Năng C TrungVuong HoangNo ratings yet
- quyểnthuyếtminhDocument64 pagesquyểnthuyếtminhDiệp Vĩ KhangNo ratings yet
- đề 1 pa3 2023Document67 pagesđề 1 pa3 2023nguyengiahuy31No ratings yet
- Chương 2&3Document67 pagesChương 2&3Du PhạmNo ratings yet
- Chương 4: Chuyển Động Một Chiều Của Chất LỏngDocument22 pagesChương 4: Chuyển Động Một Chiều Của Chất LỏngDu PhạmNo ratings yet
- Nguyễn Duy Lương - 20185001 - 124389Document7 pagesNguyễn Duy Lương - 20185001 - 124389Du PhạmNo ratings yet
- C1C2Document47 pagesC1C2Du PhạmNo ratings yet
- Chương 6: Tính Toán Thủy Lực Đường ỐngDocument30 pagesChương 6: Tính Toán Thủy Lực Đường ỐngDu PhạmNo ratings yet
- 123doc-Bai-Tap-Trac-Nghiem-Mon-Vat-Lieu-Hoc-Co-Dap-An-Đã G PDocument54 pages123doc-Bai-Tap-Trac-Nghiem-Mon-Vat-Lieu-Hoc-Co-Dap-An-Đã G PDu Phạm100% (1)