You might also like
- 1.Thu gọn hệ lực KG - V3Document6 pages1.Thu gọn hệ lực KG - V3Đạt NguyễnNo ratings yet
- Co Nhiet Chuong 4 KN BaiTap BaiGiai 20200428Document98 pagesCo Nhiet Chuong 4 KN BaiTap BaiGiai 20200428Nguyễn Nhật Cường100% (1)
- Bai Giang DLHCBDC - Chuong 1 2 3Document79 pagesBai Giang DLHCBDC - Chuong 1 2 3Vũ TườngNo ratings yet
- Chương 4: Ổn định khung phẳng cứngDocument77 pagesChương 4: Ổn định khung phẳng cứngNguyen Ngoc BinhNo ratings yet
- EMA2037 DongLuchocDocument128 pagesEMA2037 DongLuchocKhánh ĐỗNo ratings yet
- Ch.04 LoXoGiamChanHeCoKhiDocument76 pagesCh.04 LoXoGiamChanHeCoKhiKhoa NguyễnNo ratings yet
- EMA2037 Kinetic 2023Document129 pagesEMA2037 Kinetic 2023duong namNo ratings yet
- Chương 4 Cơ Tính Kim Lo IDocument5 pagesChương 4 Cơ Tính Kim Lo ITwo ZeroNo ratings yet
- Chuong 4 - Merged (3) HhuDocument25 pagesChuong 4 - Merged (3) Hhukientuong.dotrungkienNo ratings yet
- Documents - Tips Tom Tat Ly Thuyet Vat Ly Lop 12 On Thi Dai Hoc LuyenDocument14 pagesDocuments - Tips Tom Tat Ly Thuyet Vat Ly Lop 12 On Thi Dai Hoc LuyenĐăng Hiệu NguyễnNo ratings yet
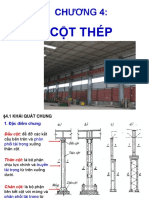
- Chương 4: Cột Thép Bài Giảng Slide Kết Cấu ThépDocument10 pagesChương 4: Cột Thép Bài Giảng Slide Kết Cấu ThépOanh phạmNo ratings yet
- Chương 2.3 Tỉ số truyền và các chỉ tiêu động học cơ cấu phẳngDocument8 pagesChương 2.3 Tỉ số truyền và các chỉ tiêu động học cơ cấu phẳngNguyễn Văn ThànhNo ratings yet
- 01.Bài Tập CHCS1 - Đã GộpDocument52 pages01.Bài Tập CHCS1 - Đã GộpBìnhNo ratings yet
- Bai Giang Chuong 6Document19 pagesBai Giang Chuong 6Dương Văn ĐạtNo ratings yet
- Chương 7,8Document48 pagesChương 7,8Huỳnh Thế PhongNo ratings yet
- Chuong 11Document14 pagesChuong 11duykhoi118No ratings yet
- C4.CNTLT PH1110Document33 pagesC4.CNTLT PH1110vuminhhieu05122004No ratings yet
- SBVLDocument12 pagesSBVLHuan ANo ratings yet
- Truyền Động Bánh Răng Hệ Bánh RăngDocument20 pagesTruyền Động Bánh Răng Hệ Bánh RăngTâm PhanNo ratings yet
- 831 1886 2 PBDocument13 pages831 1886 2 PBQuang Phạm LươngNo ratings yet
- Chuong 7-BosungDocument16 pagesChuong 7-BosungBùi Nghuyễn Văn GiápNo ratings yet
- C8. Kinematics of Rigid BodyDocument88 pagesC8. Kinematics of Rigid Bodylyly832004No ratings yet
- C6-Daodong SongDocument19 pagesC6-Daodong Songvuminhhieu05122004No ratings yet
- Sức bền vật liệu - P2Document91 pagesSức bền vật liệu - P2Soc Rua NguyenNo ratings yet
- Cọt thép PDFDocument20 pagesCọt thép PDFsyNo ratings yet
- Phan Tich Phi Dan Hoi BTCT PDFDocument27 pagesPhan Tich Phi Dan Hoi BTCT PDFvuxuandung84No ratings yet
- Robotics 6-1 Kinematics - Velocity - Jacobian Matrix - 4sDocument20 pagesRobotics 6-1 Kinematics - Velocity - Jacobian Matrix - 4sHuy Hoàng PhạmNo ratings yet
- Slide bài giảng chương 3 PDFDocument69 pagesSlide bài giảng chương 3 PDFCường Nguyễn TháiNo ratings yet
- THUYẾT MINHDocument25 pagesTHUYẾT MINHPhúc Linh NguyễnNo ratings yet
- (2) Bài Giảng Dao Động Kỹ ThuậtDocument31 pages(2) Bài Giảng Dao Động Kỹ ThuậtQuang MỹNo ratings yet
- Điều khiển bám quỹ đạo Omni Robot bốn bánh bằng phương pháp thích nghi mờ trượt - 1207564Document9 pagesĐiều khiển bám quỹ đạo Omni Robot bốn bánh bằng phương pháp thích nghi mờ trượt - 1207564minhtoan12112003No ratings yet
- VLH - C4 - Tinh Chat 15T - 3 - 4 - 2021 - FinalDocument198 pagesVLH - C4 - Tinh Chat 15T - 3 - 4 - 2021 - Finalnguyenthithanhthuong2112No ratings yet
- SBVL GT FinalDocument350 pagesSBVL GT FinalThành Đạt PhạmNo ratings yet
- 02. Xác định lực kéo đứt bulongDocument13 pages02. Xác định lực kéo đứt bulongQuốc Trí LêNo ratings yet
- Chuong 4-1 PDFDocument31 pagesChuong 4-1 PDFHoàng NamNo ratings yet
- Chapter 8. Engineering MechanicsDocument46 pagesChapter 8. Engineering Mechanics23145077No ratings yet
- Robotics 4 Forward Kinematics - VI Tri - Ma Tran Trang Thai Khau Cuoi - 4sDocument18 pagesRobotics 4 Forward Kinematics - VI Tri - Ma Tran Trang Thai Khau Cuoi - 4sKevin AlexNo ratings yet
- TT TK RobotDocument31 pagesTT TK RobotNinh Nguyễn CôngNo ratings yet
- 01-LyThuyet - 1den4-Đã G PDocument67 pages01-LyThuyet - 1den4-Đã G PPhạm Trọng ThứcNo ratings yet
- TCN2 Week3Document12 pagesTCN2 Week3Trường PhanNo ratings yet
- Chương 4 Anten Chấn TửDocument112 pagesChương 4 Anten Chấn TửNhật TrườngNo ratings yet
- Phần I. Công Nghệ Thi Công Lắp GhépDocument4 pagesPhần I. Công Nghệ Thi Công Lắp Ghéptbminhwuang171222No ratings yet
- Robotics 3 Chuyen Dong Cua Vat Ran Va Phep Bien Doi Toa Do Thuan 16x9 - Compatibility ModeDocument16 pagesRobotics 3 Chuyen Dong Cua Vat Ran Va Phep Bien Doi Toa Do Thuan 16x9 - Compatibility ModeKhoa BáchNo ratings yet
- Bai Giang Chuong 1 - Cau Truc Dong Hoc Co CauDocument36 pagesBai Giang Chuong 1 - Cau Truc Dong Hoc Co Cauhatuanphong.ftnNo ratings yet
- Chương 2Document18 pagesChương 2Hữu NhânNo ratings yet
- Chuong 1 Hướng Dẫn Thiết Kế Máy Ép Trục KhuỷuDocument58 pagesChuong 1 Hướng Dẫn Thiết Kế Máy Ép Trục KhuỷuThanh Khoa NguyenNo ratings yet
- sức bền vật liệu chương 3Document59 pagessức bền vật liệu chương 3Nguyễn TuấnNo ratings yet
- D.bai Giang SBVL 5778-OKDocument144 pagesD.bai Giang SBVL 5778-OKT.K KỳNo ratings yet
- TÍNH TOÁN COPPHA C T VÁCH (Kenhxaydung - VN)Document27 pagesTÍNH TOÁN COPPHA C T VÁCH (Kenhxaydung - VN)Pham Quan TamNo ratings yet
- Chuong 3-2Document71 pagesChuong 3-2Tùng NguyễnNo ratings yet
- De Thi Cuoi Ky CHI TIET MAY 24.12.2015Document2 pagesDe Thi Cuoi Ky CHI TIET MAY 24.12.2015Nguyễn Hữu Hải LuânNo ratings yet
- 1 - Tai Lieu Hoc Tap - SBVLDocument147 pages1 - Tai Lieu Hoc Tap - SBVLduongcongthinh1108No ratings yet
- Bai Giang Chuong 1Document36 pagesBai Giang Chuong 1Sơn TháiNo ratings yet
- Chương 10Document39 pagesChương 10phuongtienhiep05No ratings yet
- Chương 1 2. Vector Force SystemsDocument54 pagesChương 1 2. Vector Force Systemslbien984No ratings yet
- Sachvui VN Suc Ben Vat Lieu Va Ket CauDocument300 pagesSachvui VN Suc Ben Vat Lieu Va Ket CauLoi DoNo ratings yet
- Bai Giang Chuong 3 - Phan Tich LucDocument29 pagesBai Giang Chuong 3 - Phan Tich Luchatuanphong.ftnNo ratings yet
- Chapt 6Document26 pagesChapt 6phuNo ratings yet
- C6 InSVDocument6 pagesC6 InSVNguyen Ngoc BinhNo ratings yet
- Chuong 06 3 0871Document6 pagesChuong 06 3 0871Nguyen Ngoc BinhNo ratings yet
- C5 InSVDocument7 pagesC5 InSVNguyen Ngoc BinhNo ratings yet
- Chương 4: Ổn định khung phẳng cứngDocument77 pagesChương 4: Ổn định khung phẳng cứngNguyen Ngoc BinhNo ratings yet
- VNDB - Huong Dan Su Dung San NevoDocument11 pagesVNDB - Huong Dan Su Dung San NevoNguyen Ngoc BinhNo ratings yet
- Thiet Ke DULDocument39 pagesThiet Ke DULNguyen Ngoc BinhNo ratings yet
- Ổn Định CộtDocument68 pagesỔn Định CộtNguyen Ngoc BinhNo ratings yet